Des technologies de pointe au service de l’archéologie sous-marine
Qui croirait que la raréfaction du poisson constitue une menace pour les quelque trois millions d’épaves parsemant le fond des mers du monde ?
Vincent Creuze, Université de Montpellier

C’est pourtant la pêche industrielle au chalut, pratiquée souvent à plus de 1 000 mètres de profondeur et désormais partiellement limitée à 800 mètres en Europe, qui constitue l’une des principales menaces pour le patrimoine immergé des abysses. En quelques secondes, un site plurimillénaire peut être bouleversé, voire anéanti, alors qu’il a été jusqu’à présent remarquablement préservé, notamment par l’obscurité et la basse température, loin des violents courants de marée ou encore des phénomènes météorologiques de surface.
L’état de conservation remarquable des épaves profondes leur confère un intérêt archéologique majeur, mais suscite aussi, hélas, l’intérêt de quelques sociétés privées de « chasse aux trésors », qui récupèrent les cargaisons pour les revendre, sans souci d’étude archéologique et souvent en violation de la Convention de 2001 de l’Unesco sur la protection du patrimoine culturel subaquatique.
Préserver le patrimoine immergé
Face à ces menaces, les états doivent urgemment localiser et expertiser leur patrimoine culturel immergé afin d’en préserver la valeur scientifique et culturelle inestimable. Depuis quelques années, les services d’archéologie sous-marine de nombreux pays ont ainsi entamé la conquête des abysses.
La France, deuxième plus grand espace maritime mondial, possède dans cette course une position particulière. Dès 1966, André Malraux, alors ministre de la Culture, crée le DRASSM, le Département des recherches archéologiques subaquatiques et sous-marines. Depuis plus de 50 ans, les archéologues sous-marins français ont forgé leur expertise et leur savoir-faire, aujourd’hui mondialement reconnus. Jusqu’à une date récente, l’essentiel des campagnes archéologiques était limité à la plongée humaine, avec quelques incursions occasionnelles plus profondes en marge d’opérations océanographiques (Ifremer) ou industrielles (Comex, notamment).

DRASSM, 2019
Depuis les années 2010, compte-tenu de l’urgence associée à la protection du patrimoine profond, l’archéologue sous-marin Michel L’Hour, Directeur du DRASSM, a lancé un ambitieux programme de développement de moyens innovants dédiés à l’archéologie des grands fonds. La première phase a consisté à concevoir un navire adapté certes à la fouille archéologique humaine, entre 5 et 50 mètres de profondeur, mais aussi au déploiement de robots pour expertiser les épaves jusqu’à plus de 1000 mètres de fond. Ce navire de 36 mètres a été lancé en 2012 et porte légitimement le nom d’André Malraux.
La détection des épaves
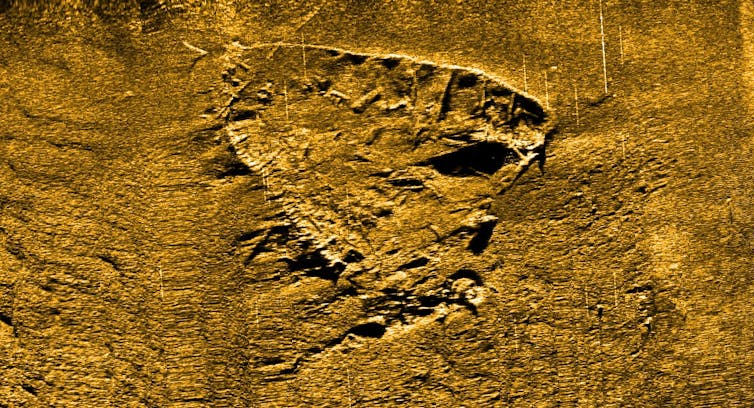
Pour la détection des épaves, les ondes électromagnétiques ne pénétrant quasiment pas dans la mer, la plupart des technologies reposent sur l’utilisation d’ondes acoustiques. C’est le cas, par exemple, du sonar latéral (sidescan sonar), une antenne acoustique tractée à quelques mètres de distance du fond marin. Elle permet de cartographier ce dernier et de détecter des anomalies du relief. Lorsqu’on souhaite cartographier au-delà de 300 ou 400 mètres de profondeur, le sonar latéral est installé sur un robot autonome appelé AUV (Autonomous Underwater Vehicle). Au sonar latéral on associe souvent un magnétomètre qui permet de détecter les anomalies magnétiques, possiblement engendrées par les masses métalliques d’une épave.
DRASSM
Ces opérations, dites de « survey », sont accomplies soit dans le cadre d’opérations archéologiques préventives (par exemple préalablement à la pose d’un câble sous-marin), soit dans le cadre de la recherche d’épaves spécifiques. Ainsi, les épaves de la Cordelière et du Regent, qui gisent à l’ouvert du goulet de Brest depuis 1512, font l’objet actuellement d’une vaste campagne de recherche. Pour ce type d’épaves, clairement identifiées, les zones de prospection sont restreintes par une étude minutieuse des archives (récits de témoins ou de rescapés, archives météorologiques, étude des courants marins, morphogéologie, cartes marines anciennes, journaux d’époque…), mais aussi par l’analyse des données océanographiques, telles que les courants, les marées ou les vents dominants.
La phase d’expertise
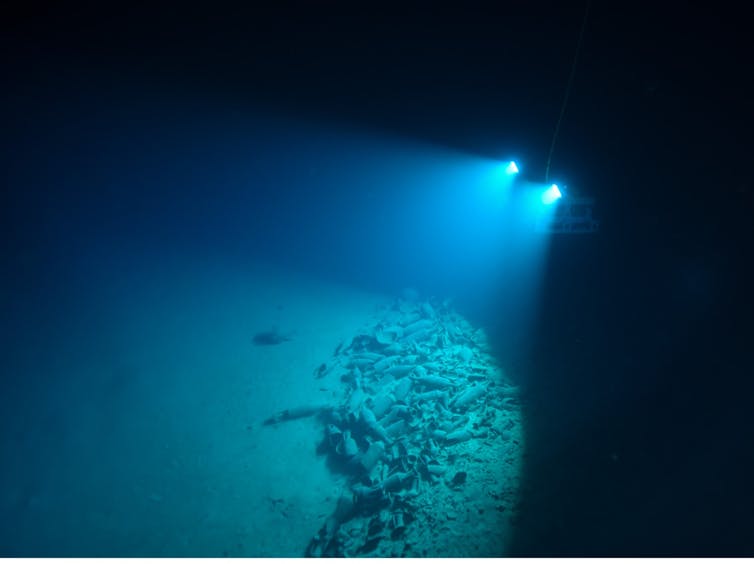
Au « survey » succède l’inspection, qui permet de déterminer visuellement si les anomalies magnétiques ou acoustiques correspondent à des épaves. Au-delà des limites de la plongée humaine, cette inspection est, le plus souvent, accomplie par un robot téléopéré, un ROV (remotely operated vehicle). Grâce à son ombilical, le câble qui le relie à la surface, le ROV transfère en direct ses vidéos au pilote qui se trouve à bord du navire stationné au-dessus de l’épave.
F. Osada/DRASSM
Si le site est intéressant, des centaines, voire des milliers de photos sont prises pour construire, a posteriori, un modèle 3D de l’épave. Cette technique, la photogrammétrie, est désormais parfaitement maîtrisée. Elle est utilisée aussi bien avec un appareil photo reflex (Ifremer, ipso facto), qu’en couplant plusieurs caméras numériques (Comex). Les modèles sont ensuite exploités scientifiquement, ou livrés au grand public pour des visites en réalité virtuelle, comme le DRASSM l’a fait pour l’épave de la Lune ou pour celle du cuirassé Danton, qui repose depuis 1917 par 1025 mètres de profondeur.
En 2019, l’Onera (Office national d’etudes et de recherches aérospatiales), le LIRMM (Laboratoire d’Informatique de robotique et de microélectronique de Montpellier) et le DRASSM ont conçu un nouveau système mono-caméra, de la taille d’une bouteille d’eau minérale, capable de produire un modèle 3D en temps-réel, tout en calculant précisément la position du robot. Cette technologie facilite le pilotage et accélère l’interprétation des sites visités.
Prélever sans casser
Lors de l’expertise d’une épave, il est parfois nécessaire de prélever des échantillons. Les ROVs existants ont été développés principalement pour l’industrie pétrolière et sont inadaptés au travail archéologique. La lenteur et la faible dextérité de leurs bras manipulateurs hydrauliques contraignent les pilotes à poser les robots sur le fond, donc sur l’épave elle-même. Les pinces hydrauliques des bras sont en outre très souvent incompatibles avec la fragilité et la forme des objets archéologiques les plus délicats (verre, bois, cuir, cordages, tissus…). Pour ces raisons, depuis 2012, le DRASSM a entamé le développement d’outils robotiques spécialisés, avec le soutien du LIRMM.
Un chantier laboratoire à 91 mètres de profondeur

Louvre : département des arts graphiques : inv 32594
La plupart des tests de ce programme sont menés près de Toulon, sur l’épave mythique de la Lune, à 91 mètres de profondeur. Ce navire de Louis XIV, dont le naufrage date de 1664, réunit la plupart des contraintes rencontrées sur les épaves profondes et permet d’expérimenter les nouveaux outils robotiques, après leur validation en laboratoire.
Ainsi, en 2014, des prélèvements archéologiques ont été accomplis au moyen d’une main robotisée, conçue par la société Techno Concept (Loupian, Hérault), puis d’une griffe.
Grâce à un algorithme de pilotage assisté par ordinateur, développé au LIRMM, le robot porteur atteint une précision horizontale et verticale de l’ordre de 1 à 2 cm, ce qui permet de s’affranchir des bras manipulateurs et de travailler « à la volée », sans toucher le fond. C’est en effet directement le robot qui pivote et se déplace pour amener en douceur la griffe ou la main sur l’objet à prélever. L’absence de bras diminue considérablement la taille des robots, ce qui leur permet d’accéder plus facilement aux zones exiguës ou complexes des épaves.

F. Osada, T. Seguin/DRASSM
Forts de ces premiers résultats, les archéologues français ont élargi leurs collaborations. Ainsi, en 2016, l’humanoïde sous-marin Ocean One, entièrement développé par l’équipe du Professeur Oussama Khatib de l’Université Stanford, a effectué sa première plongée sur l’épave de la Lune, accompagné par le DRASSM et le LIRMM. Le robot dispose de deux bras inédits, actionnés rapidement et précisément par des moteurs électriques et équipés de capteurs d’effort. Les efforts sont restitués grâce à des interfaces haptiques, sortes de joysticks motorisés permettant de piloter le robot en translation et en rotation, similaires à ceux utilisés pour la commande des robots chirurgiens.
Toujours dans le domaine de la manipulation, cette fois dans le cadre du projet ANR SeaHand, l’Institut PPrime a finalisé, début 2020, une main robotisée spécifiquement conçue pour l’archéologie sous-marine. Mesurant les efforts perçus par chaque doigt, la main SeaHand ouvre la voie à la fouille « au toucher » dans les environnements turbides. C’était impensable il y a seulement quelques années.
Toutes ces avancées comblent une grande partie des besoins de l’archéologie profonde, mais il reste beaucoup de défis à relever, tels le dégagement délicat de gros volumes de sédiments lors d’une fouille méthodique ou encore l’analyse automatique des grandes quantités de données générées lors des opérations de survey.![]()
Vincent Creuze, Maître de Conférences en robotique sous-marine, Université de Montpellier
Cet article est republié à partir de The Conversation sous licence Creative Commons. Lire l’article original.