[LUM#2] Plongée sur la Lune
Après des siècles passés au fond de la mer, la Lune, navire de guerre de la flotte de Louis XIV, se donne aux archéologues grâce à l’aide des robots sous-marins développées au laboratoire d’informatique, de robotique et de microélectronique de Montpellier (Lirmm).

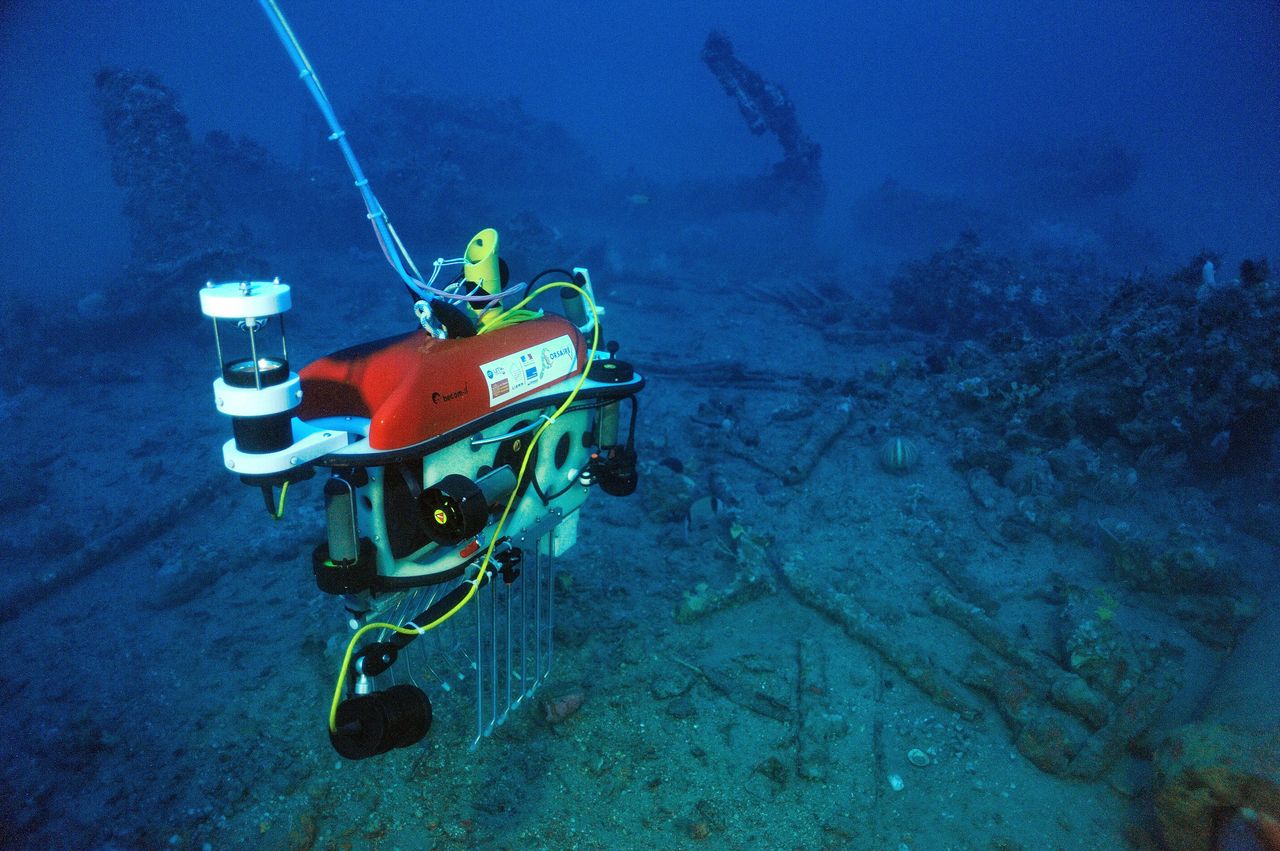
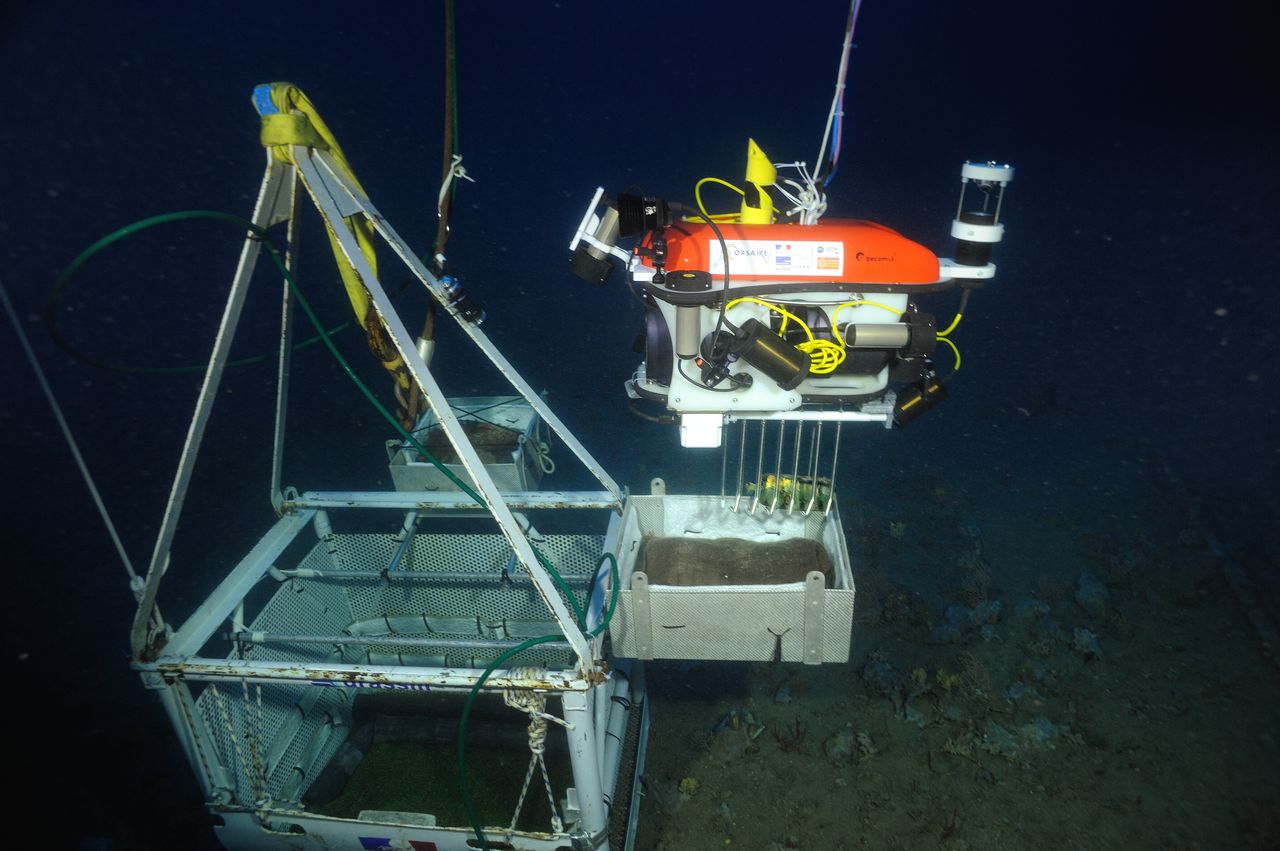
La Lune gît au fond de la mer. Ce navire de guerre de la flotte de Louis XIV a sombré en 1664 en rade de Toulon, emportant avec lui armement, vaisselle et effets personnels de l’équipage, précieux témoins d’une époque révolue qui reposent à 90 mètres de profondeur. Un trésor pour les archéologues. Et un défi pour les chercheurs : « Au-delà de 50 mètres de fond, la fouille des épaves par des plongeurs devient trop dangereuse et trop complexe », explique Vincent Creuze, chercheur au laboratoire d’informatique, de robotique et de microélectronique de Montpellier. La solution ? Les robots sous-marins, comme Speedy. Muni de caméras, il est les yeux de l’archéologue. Mais aussi sa main. « Speedy est équipé d’une main articulée munie d’un capteur de pression », explique le directeur scientifique de l’expédition. Un robot plein de finesse qui peut saisir une assiette fragile en la serrant juste assez pour la garder entre ses doigts de métal sans la briser. Une première mondiale. Et le début d’une nouvelle ère pour l’archéologie sous-marine qui va désormais pouvoir explorer des épaves de plus en plus profondes.
Pour aller plus loin :
- Lire aussi : 2000 ans sous les mers
- Écouter le podcast Des robots archéologues à l’herbier de Montpellier
Le projet Corsaire Concept est piloté par le DRASSM (Département des Recherches Archéologiques Subaquatiques et Sous-Marines du Ministère de la Culture et de la Communication) en partenariat avec le Lirmm (UM-CNRS) qui assure la direction scientifique, l’Institut PPRIME (CNRS), l’Université de Stanford, l’ONERA, le GDR Robotique et le projet ANR SEAHAND.






Photos © Teddy Séguin/ Frédéric Osada/ DRASSM/Images Explorations
Retrouvez les podcasts de l’UM désormais disponibles sur votre plateforme favorite (Spotify, Deezer, Apple podcasts, Amazon Music…).